Läsvärt Nyheter
Så seglar båten själv

Hur ska riggen på en självseglande båt se ut för att vara robust och säker? Forskare på KTH vill komma närmare svaret med projektet Maribot Vane.
Kan Maribot Vane länsa? Den frågan och ett par till vill läraren och professorn Kuttenkeuler utmana dig med. Frågorna hittar du här nedanför artikeln. Skriv sedan dina funderingar i kommentarsfältet!
Autonoma fartyg blir allt vanligare till havs. I dag används mindre fartyg för övervakning och mätningar och nästa år sjösätts exempelvis det över 80 meter långa fraktfartyget Yara Birkeland som ska kunna användas utan besättning ombord inom ett par år. Det ökande antalet självgående fartyg kommer att behöva samexistera med bemannade fartyg på haven och på Kungliga tekniska högskolan, KTH, har projektet Maribot Vane inletts för att dra slutsatser om metodik och teknik. Projektet handlar om mycket mer än själva seglingen, men det är den vi fokuserar på i det här reportaget.
Projektet
KTH-projektet utförs av forskargruppen Maritime Robotics Laboratory som dels vill driva tekniken för självseglande fartyg framåt, dels utforska möjligheter till användning av artificiell intelligens, AI. För ett fartyg handlar det om allt från ruttoptimering till perception och omvärldsuppfattning. Det övergripande målet är att skapa en autonom plattform som kan fungera till sjöss tillsammans med andra fartyg på ett säkert sätt. Tråkiga, farliga eller dyra uppgifter, som man inte vill utföra med bemannade fartyg, skulle kunna utföras av självgående robotar. Exempelvis upprepad provtagning i avlägsna och ogästvänliga områden. En av sjöfartens drivkrafter för fler självgående fartyg handlar förstås om pengar. Maribot Vane bedöms kunna produceras för samma kostnad som ett större bemannat fartyg kostar per dag.

Maribot Vane under de första fältproven. Bild: Jakob Kuttenkeuler
Projektet leds av professor Jakob Kuttenkeuler vid Centre for Naval Architecture på KTH som berättar att man, trots att finansieringen blev klar först i år, tjuvstartade med att bygga en prototyp som seglade förra sommaren.
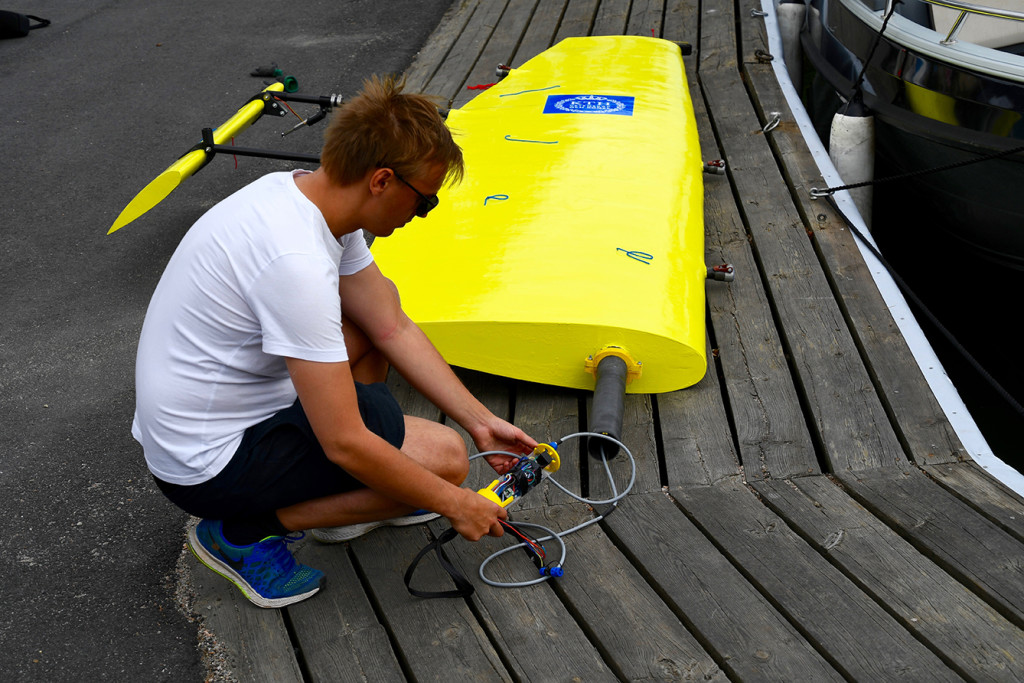
– Vi bygger Vane i en storlek som vi känner är lagom. Den är stor nog att rymma teknik och vara rimligt sjöduglig men samtidigt liten nog att kunna transporteras och faktiskt kunna bli överkörd av handelssjöfart utan att skada fartyget. Av rationella skäl föll valet av skrov på en begagnad minitolva, byggd enligt regeln 2.4 mR.
– Vi ville fort komma ut på sjön för att prova en del tekniska lösningar och koncept för att sedan förfina teknologin, säger Jakob. Men den slutgiltiga båtens skrov kommer förmodligen att se annorlunda ut. Vi hade en hel del koncept på ritbordet som vi ville prova och utnyttjar mycket 3D-printning för att tillverka komponenter för provning. Den tekniken är nästan otäckt rationell, säger Jakob Kuttenkeuler.
Gruppen som arbetar med Vane består, utöver projektledaren, av den franske forskaren Ulysse Dhomé och ett urval studenter.
– När de här unga ingenjörerna får en idé på eftermiddagen så ritar de sin lösning i cad på några timmar och sätter sedan i gång en utskrift i 3D-printern som får gå under natten, säger Jakob Kuttenkeuler.
– Nästa morgon har de en fungerande komponent på bordet. Jag måste verkligen hålla i hatten för att hänga med, skrattar Jakob som konstaterar att han ”har världens roligaste jobb”.
Teknik

Data från testbåten hämtas in i realtid.
De framgångsfaktorer för Vane som maskin är ’’robusthet, robusthet och robusthet’’, enligt forskarna.
– Att vara liten som en 2.4mR och segla framgångsrikt non-stop i månader på öppet vatten handlar inte om att maximera båtfart, säger Jakon Kuttenkeuler.
– Det handlar snarare om att hålla ihop, att inte gå sönder och att vara enträgen. Teknik, elektronik och mjukvara måste fungera i alla väder och klara av monotona nötning därute. Det är förstår en stor utmaning!
– Vi måste frigöra oss från den vanliga strävan efter max båtfart. En autonom segelbåt som Vane ska snarare vara enkel och finurligt konstruerad än komplex och intrikat.
– Men att reducera segelarean och ibland offra finess för robusthet, kan göra ont, speciellt i ett franskt kapp-seglarhjärta, ler professorn som själv seglat sedan barnsben.
Dessutom vill forskargruppen åstadkomma en segelteknisk lösning som i så stor utsträckning som möjligt sköter sig själv. Ett vindroder är ett bra exempel på den typen av metodik. Man vill alltså att båten mekaniskt ska hålla sin kurs utan att datorsystemet måste vara aktivt hela tiden. Lyckas man med detta minskar slitaget och framför allt minskar behovet av elektrisk energi till styrservot, som många långfärdsseglare redan vet. Idealet för projektet i dagsläget är att bara behöva justera inställningarna en gång i timmen på öppet hav. En elektrisk autopilot av standardtyp skulle sluka alldeles för mycket energi.
Riggen

Maribot Vane följs alltid av en båt och kan delvis fjärrstyras. Bild: Jakob Kuttenkeuler
Den mest iögonfallande skillnaden mellan Vane och en konventionell segelbåt är riggens utförande. Vane har en vingmast som skiljer sig från många andra vingmaster vi ser nu för tiden. Masten är exempelvis helt symmetrisk.
– Detta är praktiskt eftersom Vane ska vara enkel och robust och därmed inte har justerbart vingtvärsnitt, säger Jakob Kuttenkeuler.
En annan skillnad är att Vanes vingmast saknar konventionellt skot och riggen roterar helt fritt relativt skrovet.
Så här fungerar det i praktiken, enligt Jakob Kuttenkeuler: ’’När man i en vanlig segelbåt trimmar seglet med skotet gör man det för att optimera seglets geometri och attityd till den inkommande vinden (den skenbara vinden). Skotet sitter dock fast i båtskrovet som rör sig, vilket betyder att om båten girar, guppar eller kränger (eller om vinden förändras) med skotet fixerat så ändras seglets inställning relativt vinden och vi måste då vara aktiva och trimma om seglet för de nya förhållanden som uppstod. Vi vill alltså trimma seglet relativt vinden men använder en mekanism (skotet) för att trimma seglet relativt skrovet. Denna metod fungerar hyfsat på en bemannad båt men är lite för pyssligt för Vane, som i stället låter vinden skota seglet (vingen).
Om vi tittar i figurens läge 1 (se nedan) så ser vi båten okrängd ovanifrån med riggen helt fri att rotera kring ”masten”. Riggen består av vingen (den stora) och fenan bakom vingen. Målet är att vingen ska generera kraft som vi kan segla på. Fenans roll är faktiskt att agera skot, det vill säga att trimma vingens vinkel till den inkommande vinden. I läge 1 är fenan inställd parallell med vingen vilket gör att hela riggen flöjlar i vinden utan att generera annat än lite motstånd. Riggen står alltså i vindögat. Notera att detta sker helt oberoende av hur skrovet rör sig under riggen eftersom riggen är fri att rotera hela varvet runt.
När Vane sedan vill segla ställer Vane ut en vinkel (d) på fenan så som visas i läge 2. Den börjar generera kraft (pilen i figuren) och eftersom denna kraft inte verkar genom riggens rotationscentrum skapas ett vridmoment som vill rotera riggen medurs i figuren. Riggen är inte i statisk jämvikt.
Rotationen fortsätter till dess att vridmomentet från fenan är noll, det vill säga ungefär då fenan pekar rakt mot skenbara vinden, läge 3. I detta läge har vingen vridits ungefär till vinkeln d och genererar nu kraften Fv som är den som driver båten. Om vinden vrider kommer riggen att hänga med i vridningen. Om båten styr under riggen kommer riggen inte att märka detta. Vi har alltså skapat en självskotande kraftgenerande rigg som inte behöver pysslas om annat än när vi vill byta bog, då vi helt enkelt vrider fenan åt andra hållet.’’
Hänger du med i seglingsteorin i texten nedan? Isåfall vill läraren och professorn Kuttenkeuler utmana dig med ett par frågor:
Bilderna 1–3 visar alla ett bidevindläge.
1: Hur gör Vane för att länsa?
2: Kan man sätta vindroder på Vane?
3: Skulle Vane rent av kunna segla baklänges?
Skriv dina funderingar i kommentarsfältet här nedanför!
-
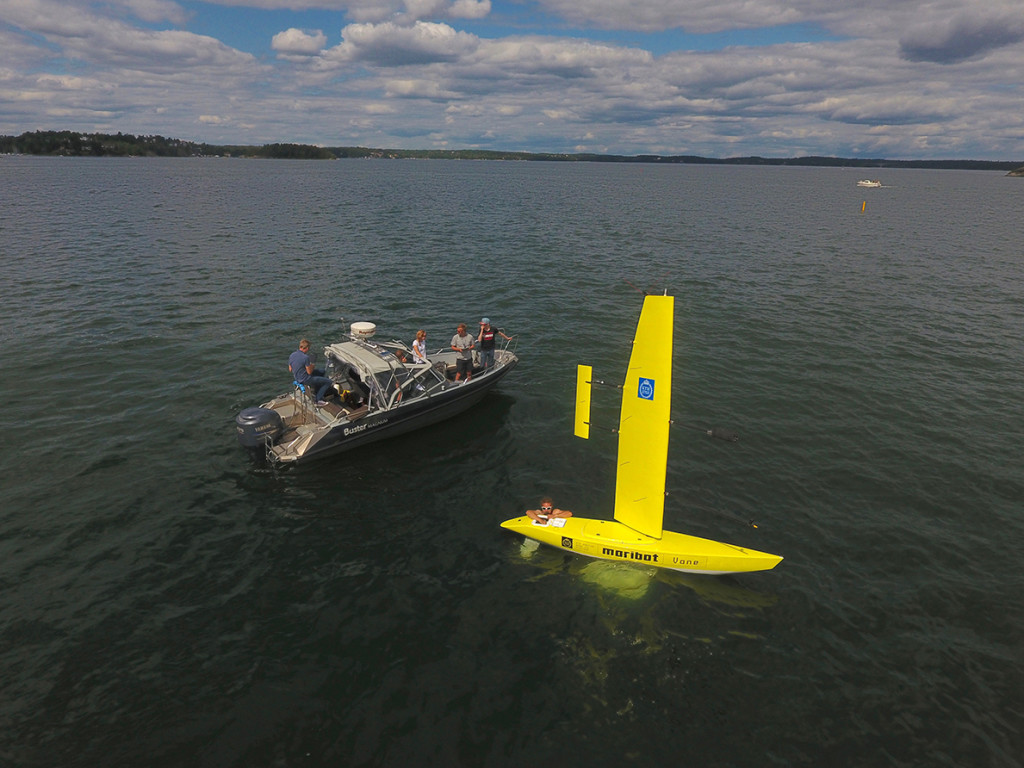
- Maribot Vane testas i Stockholms skärgård sommaren 2017.
-

- Maribot Vanes skrov är en mini-tolvas.
-
- Robusthet är högt prioriterat på bekostnad av finess.
-

- Cad-ritning och 3D- printning är avgörande i konstruktionsarbetet.
-

- KTH-projektet utförs av forskargruppen Maritime Robotics Laboratory.
-
- Studenter vid KTH arbetar med olika delar av Maribot Vane.
-

- Vad kan en självseglande rigg som Maribot Vanes klara av? Svara på frågorna i kommentarsfältet!
Johan Boström
Jakob Kuttenkeuler
redaktion@pakryss.se
BILDER:
Jakob Kuttenkeuler
Ulysse Dhome




Hej
Jag tror också att länsande börjar med fenan rakt förut, men vinklas inte fenan därefter så att vingen ställer sig i dragläge (vinkel alfa i bilden) i förhållande till den skenbara vinden. För att segla baklänges lite stabilare undrar jag om det inte krävs undervattenskroppen (främst kölen) har samma tryckcentrum vid rörelse bakåt som när båten rör sig framåt. Fenan är väl ett slags vindroder och med ett ytterligare ett, finns det väl en risk för stora pendlingsutslag.
Hej,
Kul båt och projekt! Jag tävlade windsurfing i ca 10 år och är seglare. En vindsurfare har också fri rotation av rigg och bräda och är helt beroende av balansen mellan seglets tryckpunkt och kölens/centerbordets motverkan. Ert ”segel” har alltid tryckpunkten mitt ifrån masten. Kan dock tänka mig att vane är lite lovgirig när vinden friskar i.
Svar:
När Vane skall länsa vrids fenan så att den tjocka delen pekar rakt bakåt. Visst kan Vane segla baklänges även om det blir vingligt pga fenan/rodret. Det går det även att göra på en vindsurfingbräda.